
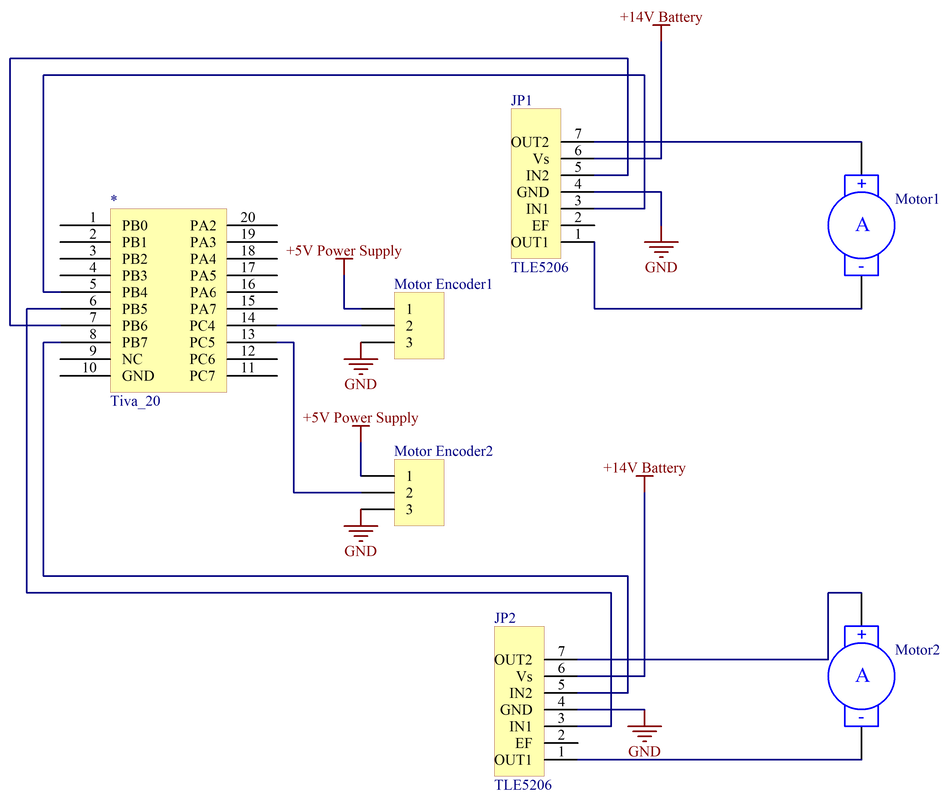
Motors: H-Bridge and EncodersWe are using a similar H-bridge to the ones used in Lab 7 (use of encoder) and Lab 8 (implementation of 2 motors). Due to the use of 2 7.2V batteries in series, we replaced the L293NE motor driver with a TLE5206. We drive the motors in drive-brake mode. |
|
Accelerometer
|
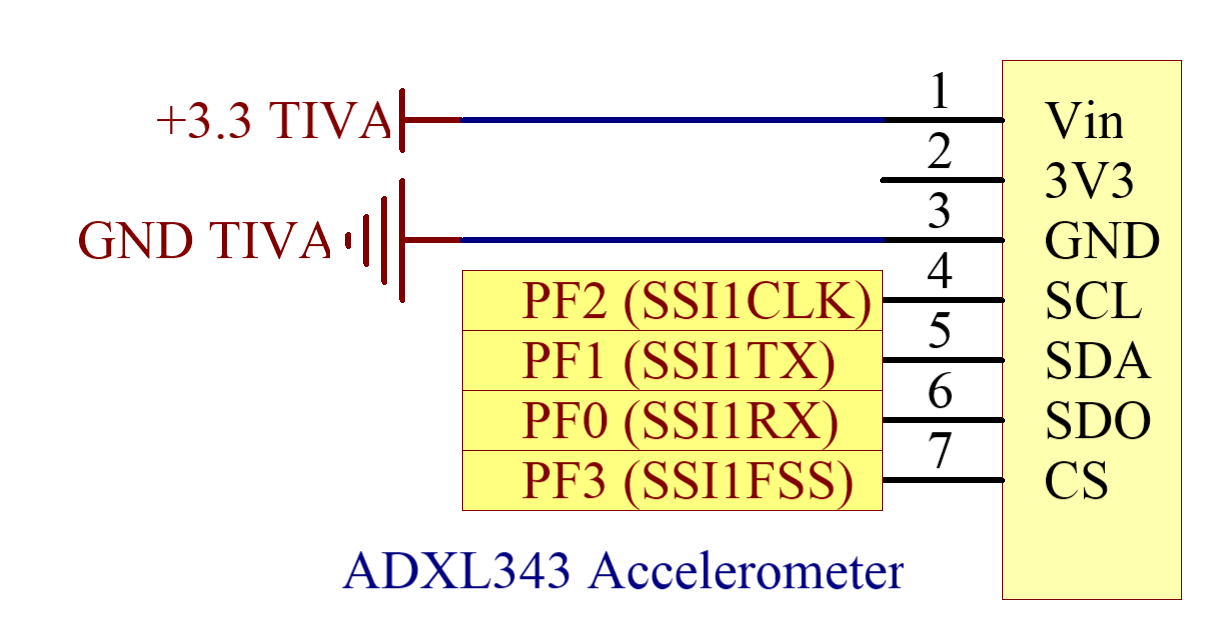
The Accelerometer was used to determine the orientation of the robot which assisted in the navigation strategy.
|
|
Electromagnet
|
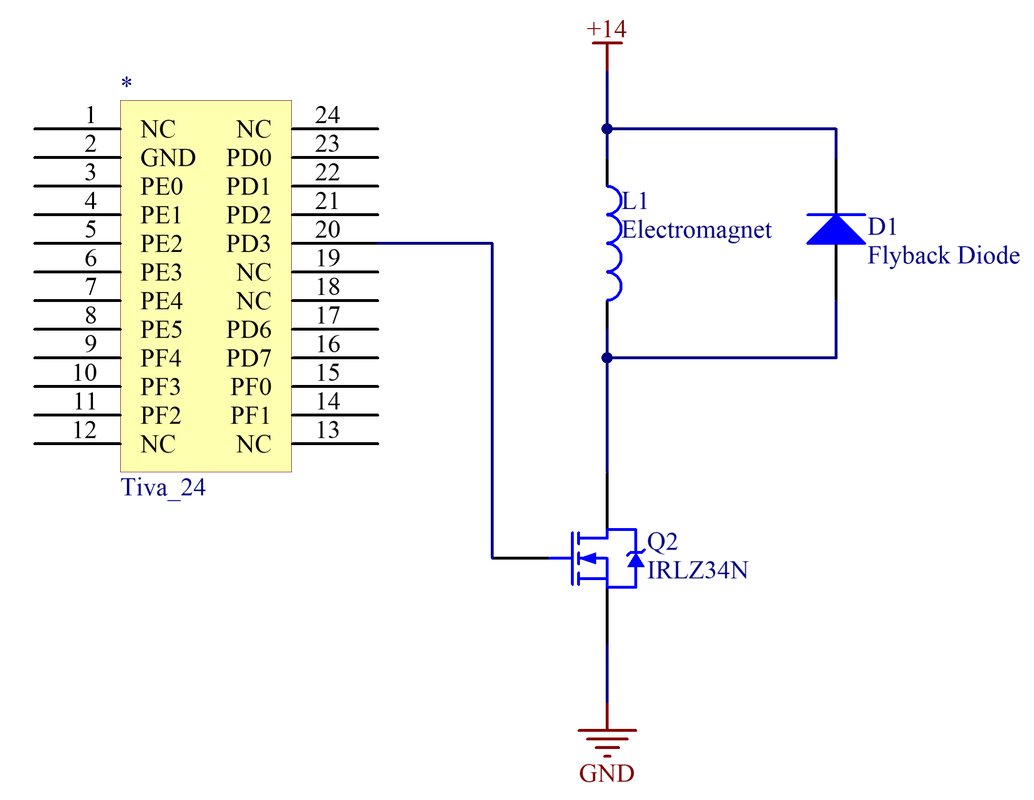
In order to “grab” the MINER and maneuver it around the field, we took advantage of the ferrous strip around the MINER and activated an electromagnet to attract the MINER to our robot.
|
|
SPUD: SSI Communication
|
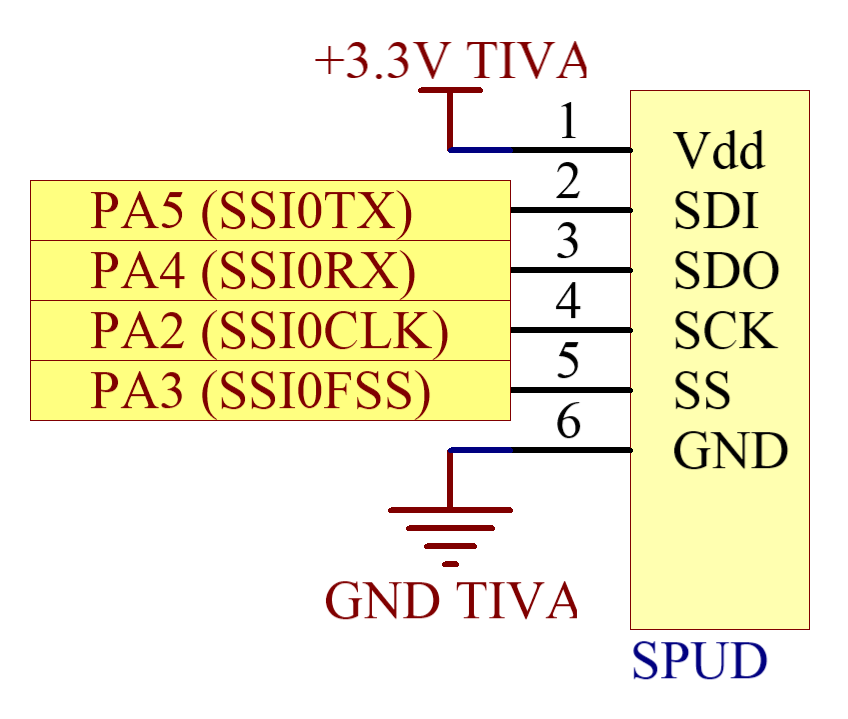
The SPUD(Synchronized Permitting and Usage Designator) was powered using 3.3V from the TIVA. The SPUD uses synchronous serial signaling method to transfer data and stores status of the game in terms of when permits issued or expired, and miner locations that are known and unknown.
|
|
Beam Break
|
In order to know when the magnet has made contact with the MINER and beam will be placed in front of the electromagnet such that when the MINER makes contact, the beam is broken and the system can be notified via an event.
|
|
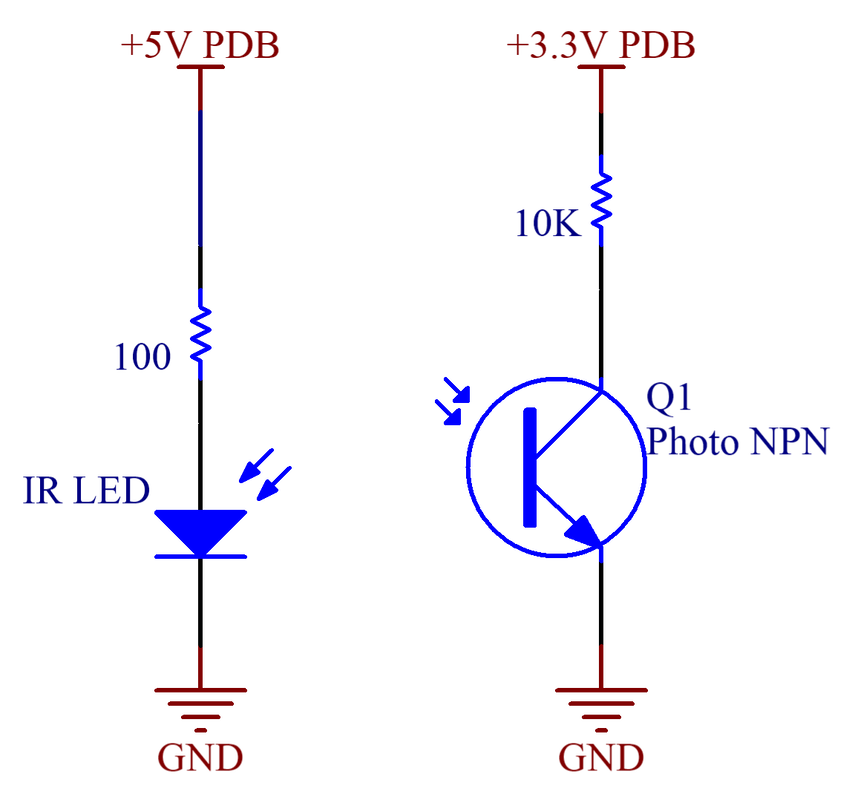
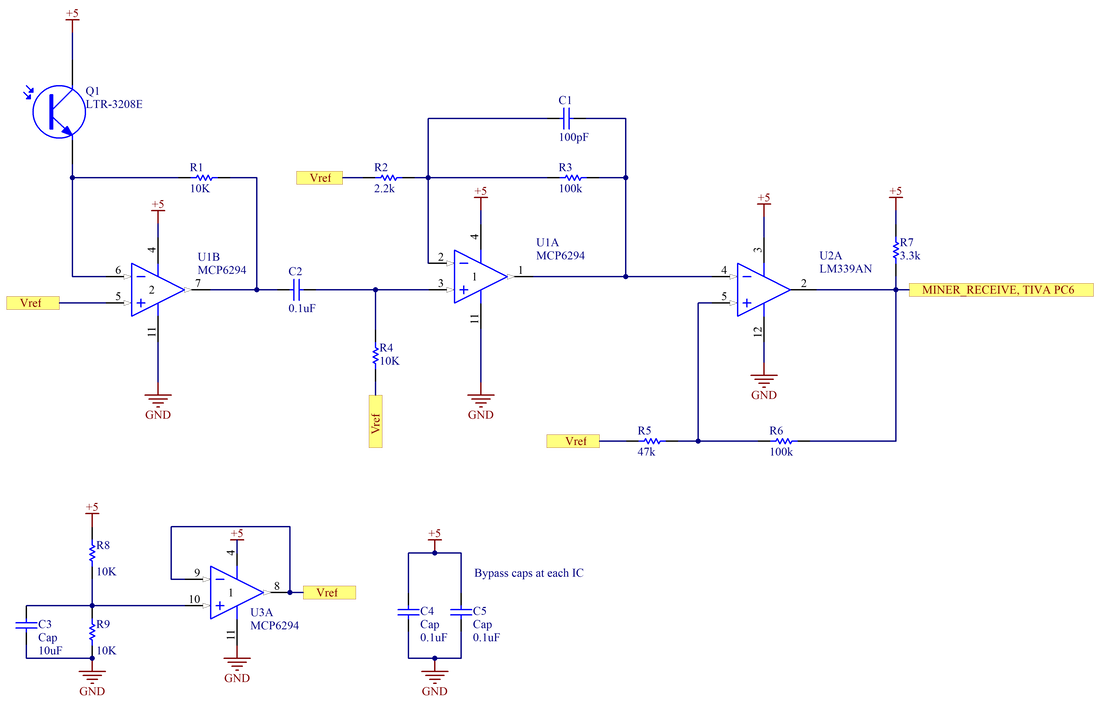
IR Sensing for Location of Miner
|
IR sensing of the MINERs was achieved through the use of a trans-resistive amplifier, high-pass filter, inverting amplifier, and an inverting comparator with hysteresis.
Trans-resistive amplifier was used to convert the current through the phototransistor to voltage with a proportionality constant set by Rf = 10K, Vref was determined by creating a voltage reference buffer circuit with voltage divider of two 10K resistor to get a Vref of 2.5V. |
The high pass filter filters out frequency below the cutoff frequency and the cutoff frequency was determined to be about ten times below 1450Hz, the frequency transmitted by the given beacon. Then the voltage was amplified and inverted to get a frequency reading of the MINERs using TIVA PE0.
|
Limit Switches on Bumper
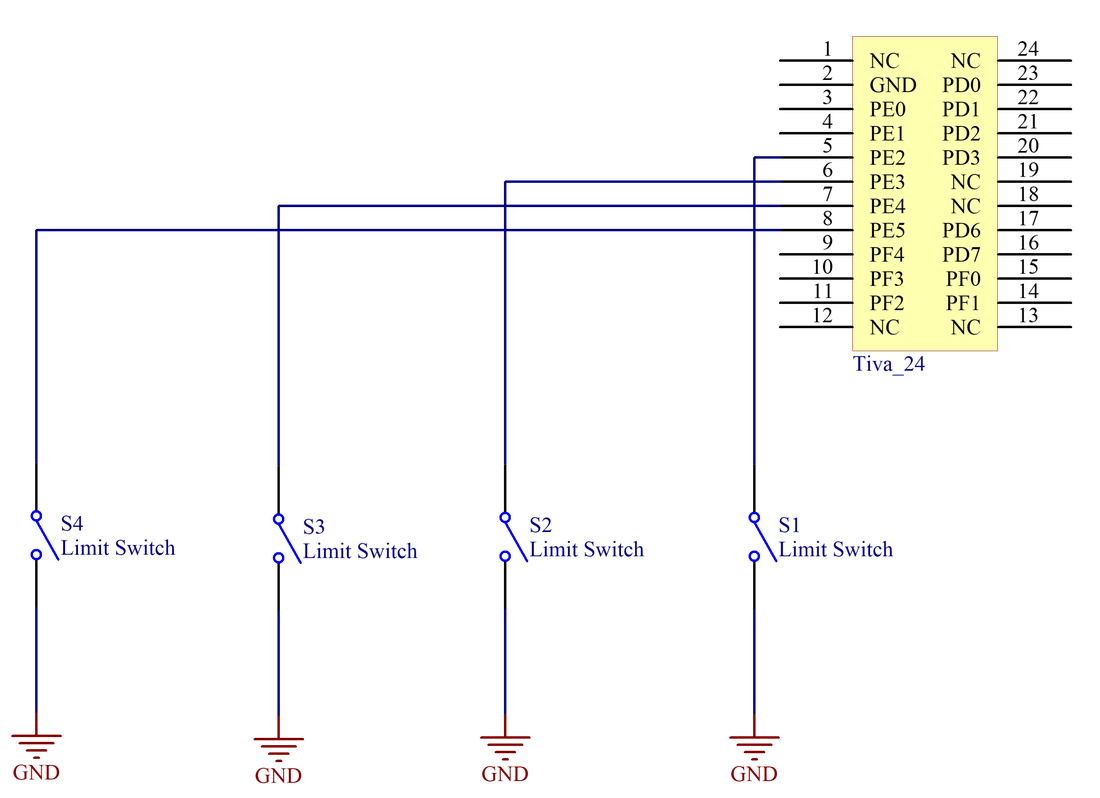
The pins PC4-PC7 were initialized as input pullup pins and connected to four limit switches that was used to detect bumper collisions.
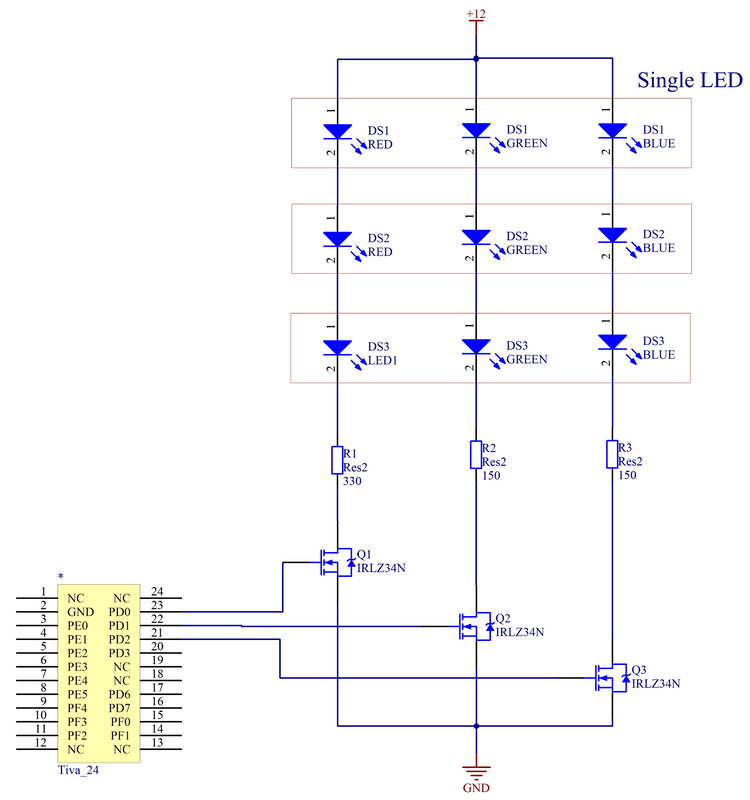
Team Allocation LEDs
|
We used an RGB LED strip surrounding our robot to display our team affiliation. We also used the LEDs to indicate whether we were in standby mode (blinking lights) or mining mode (steady light).
|
|
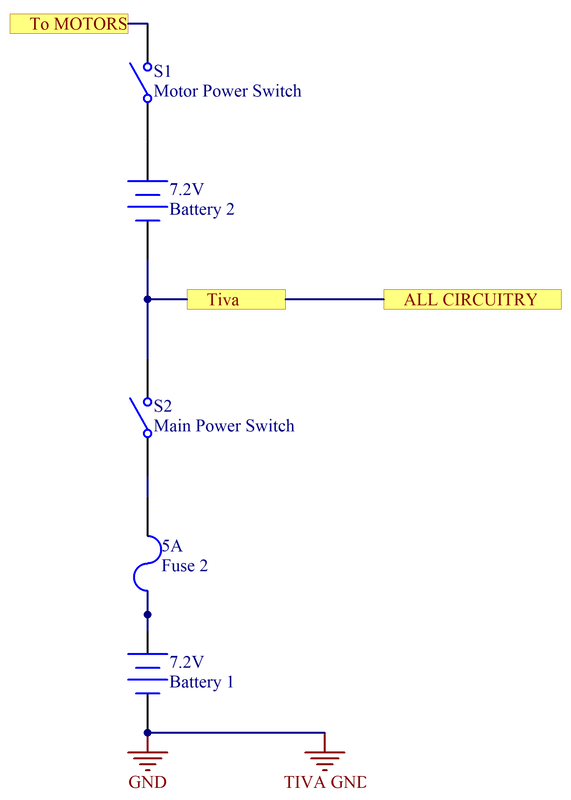
Power Distribution
|
We had a pair of 7.2V batteries in series powering our robot. The motors would receive 14.4V, while the TIVA itself would receive 7.2V. The TIVA had circuitry capable of providing 5V and 3.3V to other components.
We had separate switches so we could power the TIVA (and connected sensors) without powering the motor, which was useful for debugging. Additionally, a 5A fuse was used to protect us from any short circuits. |
|
