
Overview of Robot Function
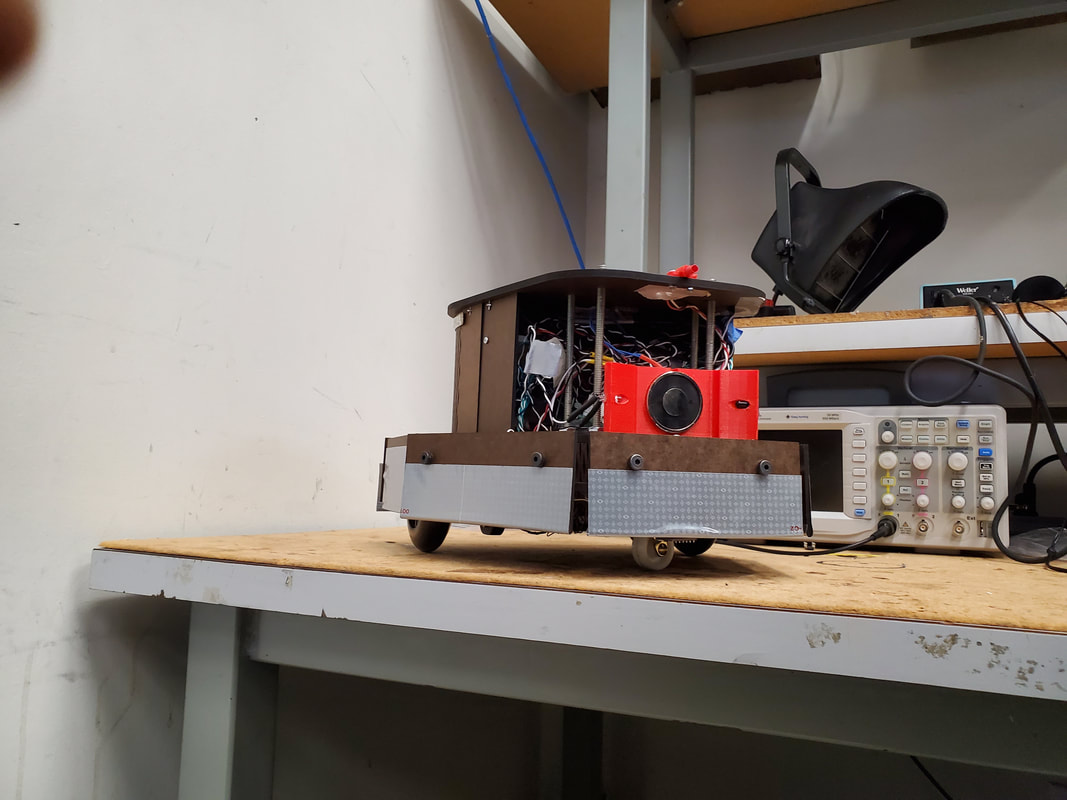
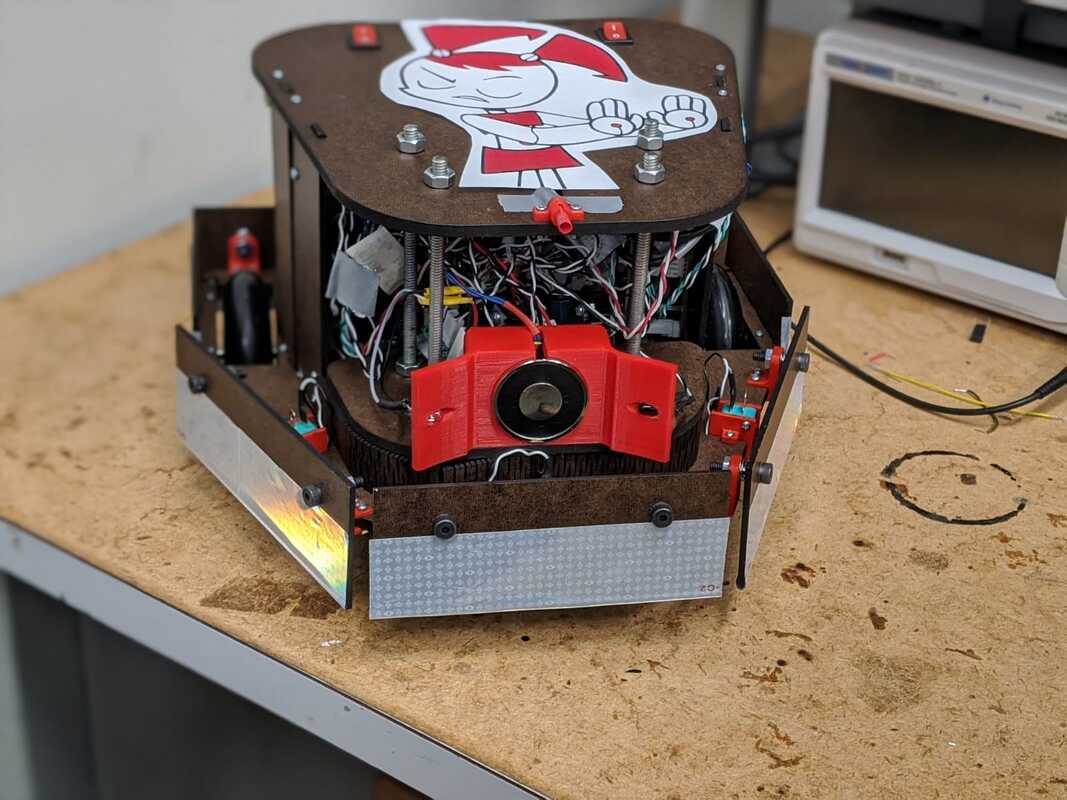
We designed and manufactured our robot to comply with the guidelines set by the ME 218B Teaching Staff and Coaches. Our robot, named X-J9(x2) *, can determine what MINER it needs to transport, determine its location on the Peterson Pediment using a color sensor and accelerometer, grab the MINER using an electromagnet, and detect collisions using a mechanism on the bumpers.
Our robot starts off the game in “Standby” mode with TEAM LED flashing red(company CKH) or blue(company GHI). By reading from the SPUD (which receives data from the game master), the robot know when it can start mining.
As soon as we leave "Standby" mode, we select a target MINER. The robot would then rotate, trying to find that MINER by using its IR detection circuit (each MINER has an IR LED flashing at different periods). When it finds the MINER, the robot stops rotating and moves directly forwards towards the MINER.
As we impact the MINER, the beam break circuit on the front of the robot would detect the presence of the MINER and use the electromagnet grabber to hold the MINER in place.
The robot then navigates to a valid scoring zone. Our robot knows the correct locations from the SPUD. As each zone on the field has a different color, the color sensor on the robot determines our current position. With knowledge of current location and where the robot needs to get to, the robot rotates to the correct orientation. The robot reads its orientation using only an accelerometer because the field is inclined.
Upon reaching the valid scoring zone, the SPUD would show that the MINER the robot carries is in the correct location. After this occurs, the electromagnet turns off and the robot backs away, searching for the next target MINER.
At any point in this process, if the robot's bumpers are hit, the robot backs away, rotates 90 degrees and drives forwards.
When the game time runs out, the robot ceases all action.
Our robot starts off the game in “Standby” mode with TEAM LED flashing red(company CKH) or blue(company GHI). By reading from the SPUD (which receives data from the game master), the robot know when it can start mining.
As soon as we leave "Standby" mode, we select a target MINER. The robot would then rotate, trying to find that MINER by using its IR detection circuit (each MINER has an IR LED flashing at different periods). When it finds the MINER, the robot stops rotating and moves directly forwards towards the MINER.
As we impact the MINER, the beam break circuit on the front of the robot would detect the presence of the MINER and use the electromagnet grabber to hold the MINER in place.
The robot then navigates to a valid scoring zone. Our robot knows the correct locations from the SPUD. As each zone on the field has a different color, the color sensor on the robot determines our current position. With knowledge of current location and where the robot needs to get to, the robot rotates to the correct orientation. The robot reads its orientation using only an accelerometer because the field is inclined.
Upon reaching the valid scoring zone, the SPUD would show that the MINER the robot carries is in the correct location. After this occurs, the electromagnet turns off and the robot backs away, searching for the next target MINER.
At any point in this process, if the robot's bumpers are hit, the robot backs away, rotates 90 degrees and drives forwards.
When the game time runs out, the robot ceases all action.

*named X-J9(x2) because 9x2 =18 for 218! XD


